Canis roboticus est robot quadrupes, genus roboti crurum habens, specie animali quadrupedi simili. Independenter ambulare potest et proprietates biologicas habet. In variis condicionibus geographicis ambulare et varia motus complexos perficere potest. Canis roboticus computatrum internum habet quod staturam suam secundum mutationes ambitus accommodare potest. Vel iter simplex praefinitum ipse sequi potest, vel e longinquo regi. Canis roboticus descriptus est ut "robotus mundi provectissimus, ad loca aspera aptatus".
Progressu technologiae, canes robotici in amplissima varietate rerum adhibiti sunt, a rebus militaribus ad industrialem, ad curam familiarem, et cetera, et commercium inter canes roboticos et homines auctum et progressum facit. Canes robotici officia praestant in locis ut officio, investigatione et liberatione, et traditione.
In flexibili interiore canis robotici, pars principalis est motor crurum. Omnis articulatio membrorum canis robotici a motore agitanda est, et per hoc tempus, motor connectorem hybridum signi potentiae uti debet ad hanc functionem impulsivam assequendam. In usu practico, propter spatium angustum et compactum intra membra canis robotici et ambitum applicationis externae, omnes requisita severa pro obturaculo mixtionis signi potentiae proposuerunt, ergo qualis connector mixtionis signi potentiae idoneus esse potest?
Quae sunt requisita canis robotici in connectionibus?
Canis roboticus exemplar nuper in industria roboticarum intelligentium annis proximis emersit. In praesenti, producta nostra commoda absoluta in pretio et connectoribus parvi voluminis et magnae currentiae praebent, ita clientes in industria canum roboticorum nostra producta ad tempus eligunt.
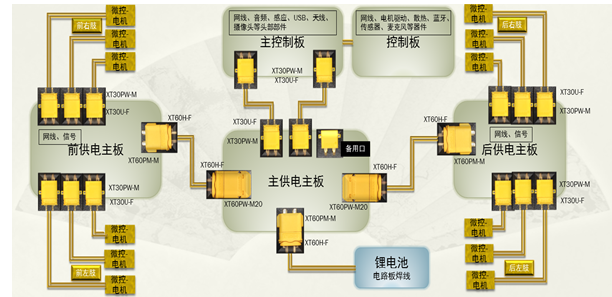
Diagramma circuli applicationis canis robotici connectoris hybridi signalis potentiae Amass
In praesenti, emptores in industria canum roboticorum exspectant productum emendari: productum fibula claudente instructum esse debet, quia saltus canis robotici et aliae actiones connectorem mixtum signorum potentiae requirunt ne cadat. In praesenti, emptores semper vitant ne connector per processum glutinis cadat. Quarta generatio productorum seriei Amass LC, cum fibula trabeculata, necessitatibus industriae canum roboticorum satisfacit.

Analysis praecipuorum rerum seriei Amass LC
1, parvum volumen magnum fluxum, spatio non circumscriptum
Saltem duo motores requiruntur ad canem roboticum impellendum ut in utroque membro ambulet, quae multum spatii occupant et parvum locum connectoribus relinquunt. Connector obturaculi hybridi signalis potentiae seriei Amass LC minus quam 2 cm est ad minimum et magnitudinis articulationis digitalis, quod aptum est spatio angusto installationis intra canem roboticum.
2, fibulae forma trabis, insertum se claudit, de casu non est sollicitus.
In processu productionis connectorum, forma claustrae nexus magni momenti est. Cum connector vim externam subicitur, claustra maximam partem vis externae mature communicare potest, ut functio connectoris contra lapsum praestetur. Cum canis roboticus saltus repentinos facit aut per vias montanas asperas ambulat, connector potentiae internus facile a vibratione externa laxior est. Fibula trabalis connectoris mixti signalis potentiae seriei LC functionem auto-clausurae momento insertionis perficit, quod magis ad usum canis robotici in tali ambitu applicationis favet!

3, gradus tutelae IP65, extra aedes etiam libere adhiberi potest
Canes robotici intelligentes apti sunt ad custodiam, detectionem, investigationem et liberationem, vecturam, aliasque condiciones externas. Ut omnes scimus, ambitus externus incertus est, pulvis, pluvia, aliaque elementa externa facile ad operationem canum roboticorum intelligentium adducunt. Obturaculum hybridum signalis potentiae seriei Amass LC gradum tutelae IP65 attingit, efficaciter aquae et pulveris intrusionem prohibens, ut normalis operatio canum roboticorum extra aedes curetur.
Praeter supradicta commoda et insignia, series LC etiam habet resistentiam altae temperaturae, resistentiam bassae temperaturae, resistentiam ignifugam V0 et alia commoda, apta variis machinis mobilibus intelligentibus intus!
Tempus publicationis: XVI Kalendas Decembres, anno MMXXII